Biologging and Raspberry Pi
Source: Phillips et al., Deep-Sea Research I 2019
We’ve found fantastic research made by a group of oceanologists. They suggest affordable solution based on the Raspberry Pi computer, 3D printed cases and several engineering tricks to obtain results, previously accessible for expensive professional systems only. Now this system (called DEEPi) is based on a Raspberry Pi Zero, but the next generation is planned to be equipped with the two cameras and based on the StereoPi. In this article we’ll cite two related paperworks.
Bio-logging Introduction
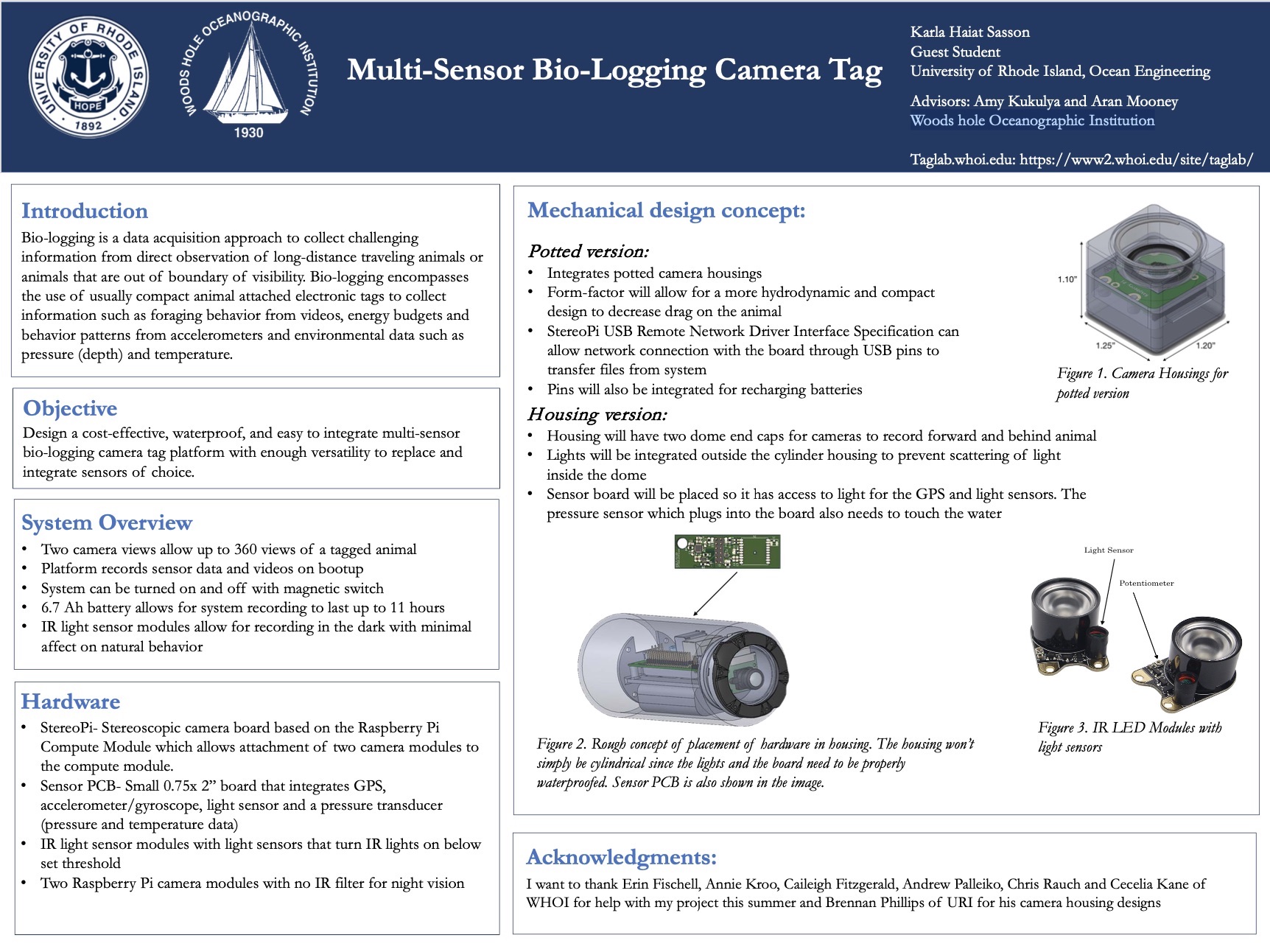
Bio-logging is a data acquisition approach to collect challenging information from direct observation of long-distance traveling animals or animals that are out of boundary of visibility. Bio-logging encompasses the use of usually compact animal attached electronic tags to collect information such as foraging behavior from videos, energy budgets and behavior patterns from accelerometers and environmental data such as pressure (depth) and temperature.
Why is it difficult?
Deep-sea cameras are traditionally expensive components, and are almost exclusively fabricated as 1-atm pressure housings made of aluminum, stainless steel or titanium, combined with custom-made optical viewports. Such housings are costly to fabricate, and are large compared to the camera itself. As a result, deep-sea cameras are expensive, bulky components of underwater vehicles and remote systems; this is particularly true for HD- and higher-resolution cameras. In autonomous recording systems such as BRUVs and biologging animal tags, camera size and form factor directly influences the physical design of the entire system and limits the operational endurance.
Recent advances in commercially-available 3D printing, specifically stereolithography-based (SLA) printing systems utilizing photopolymer resin, offer the advantage of creating completely solid parts in high resolution. This technology enables rapid prototyping of marine- relevant design features such as o-ring seals, ribbon-cable pass- throughs, and complex internal geometries.
Current solution
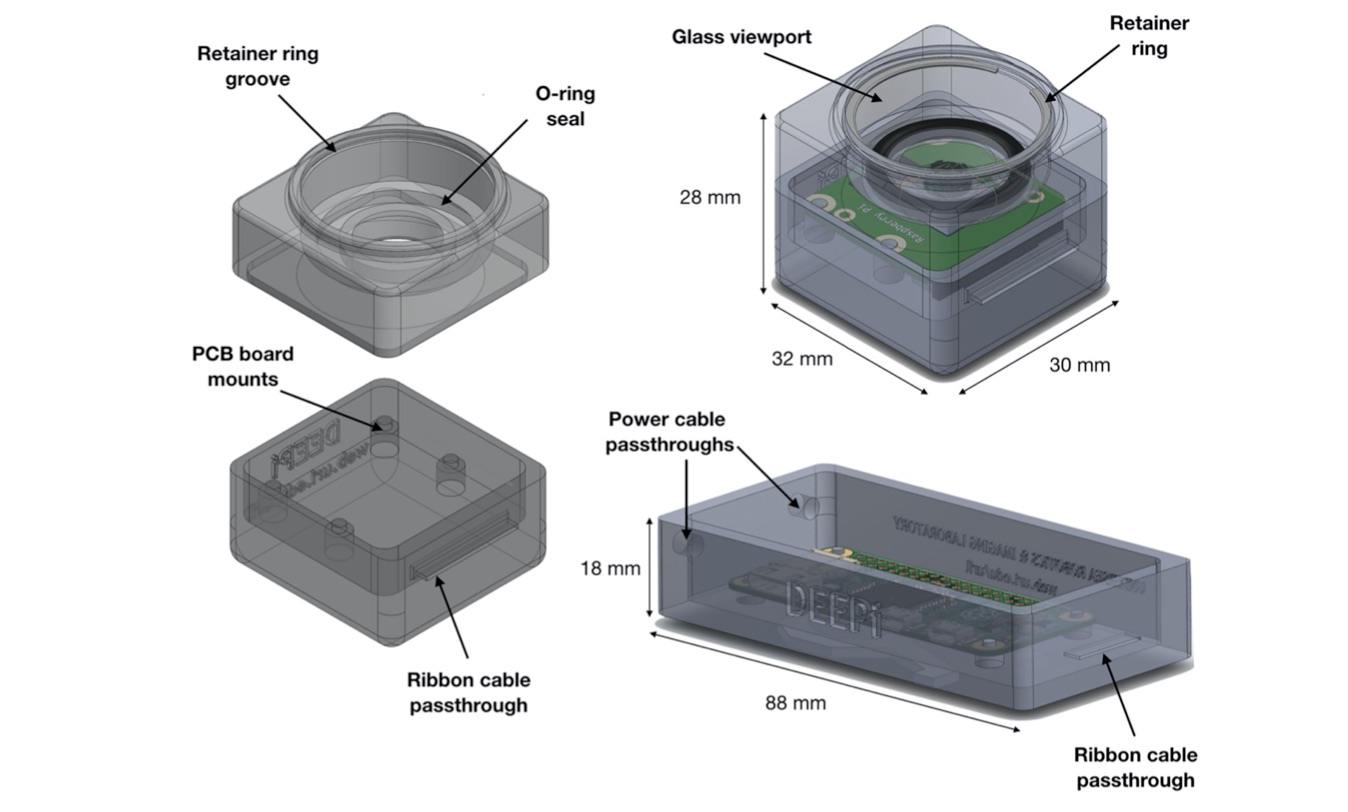
Fig. 2. (Left) DEEPi camera module 3D-printed shell models. (Right) Assembly models of the camera module and Raspberry Pi Zero W control computer. Source: Phillips et al., Deep-Sea Research I 2019
The DEEPi camera is based on the Raspberry Pi Camera Module v2, which is capable of capturing 8MP still images and 1080p30 video with a field of view of 62.2 degree. The Camera Module v2 is mounted inside a 3D-printed ‘shell’ consisting of two halves. The lower half mounts the PCB board and includes the ribbon-cable pass-through, which is dimensioned slightly larger than the ribbon cable itself.
The upper half of the camera shell consists of the viewport mount, o-ring seal, and retaining ring. Internal dimensions of the shell assembly are designed to visually guide epoxy filling on a level surface, so that the viewport and o-ring seal are sup- ported underneath with filled material while the lens assembly remains dry and accessible for focusing (Fig. 3).
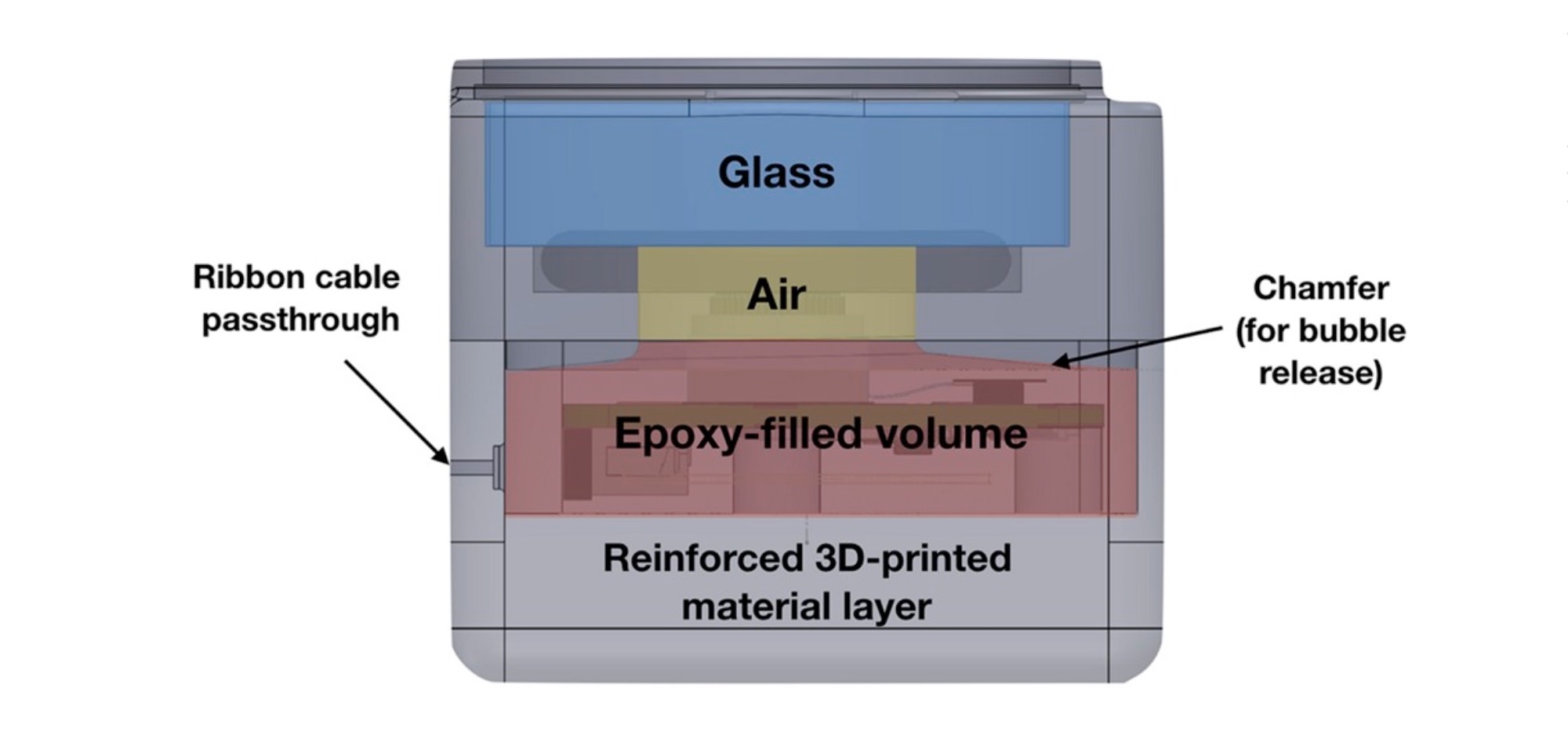
Fig. 3. Cross-section of DEEPi camera module, showing the epoxy-filled vol- ume in relation to the 3D-printed shell and glass viewport. Source: Phillips et al., Deep-Sea Research I 2019
Current results
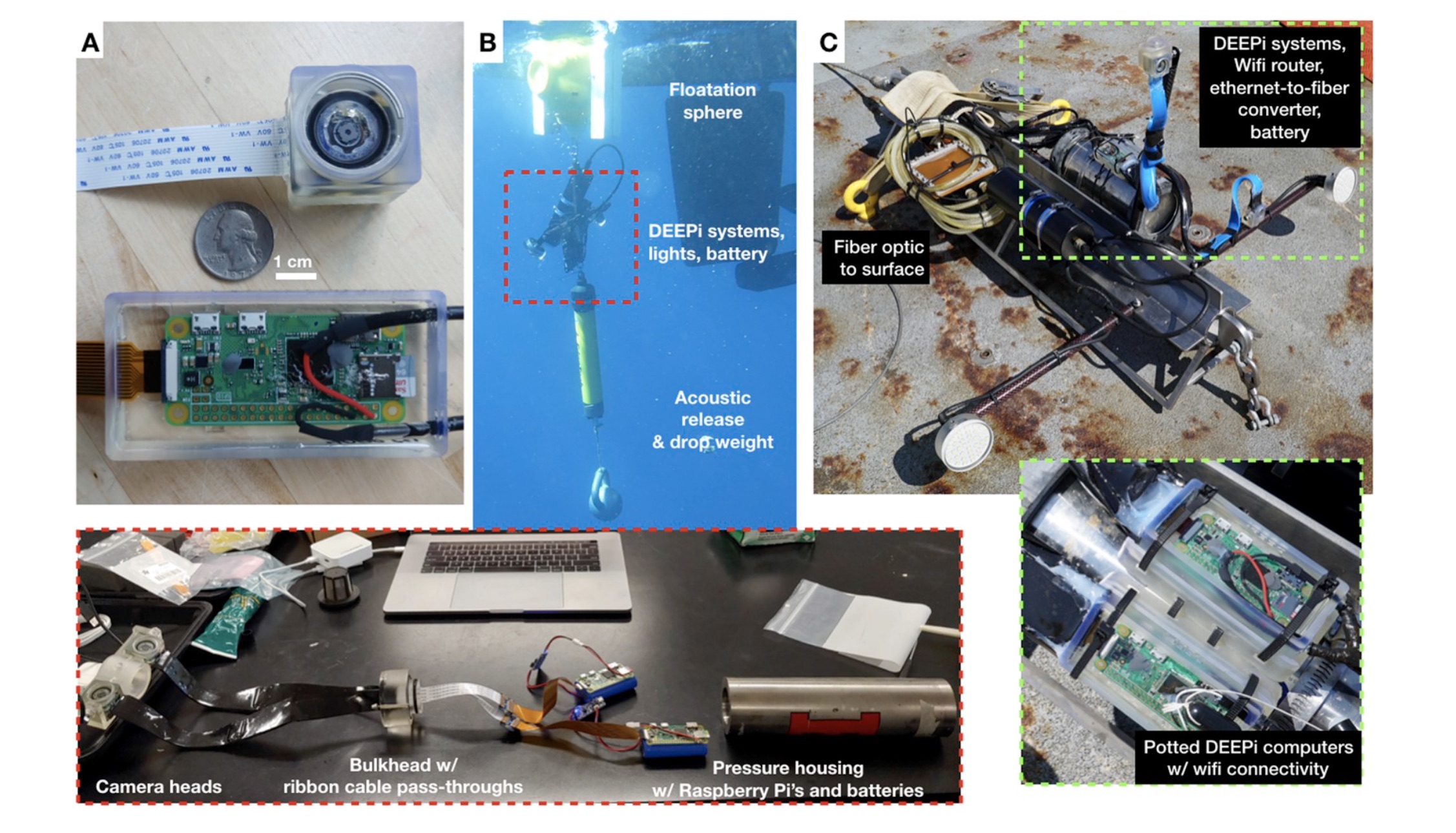
Fig. 1. (A) DEEPi system components, including remote camera head (top) and epoxy-potted Raspberry Pi Zero W computer. (B) BRUV system used to deploy the DEEPi system in Bermuda. (C) Custom imaging payload used to visually guide a Smith-MacIntyre benthic grab (not shown) in Baltimore Canyon, USA. The payload used a battery-powered wifi connection to stream live video from DEEPi control computers attached to the outside of a 1 atm housing. Source: Phillips et al., Deep-Sea Research I 2019
The DEEPi camera system has been laboratory tested for functionality and physical resistance to implosion to a maximum of 59 MPa/ 5780 m depth. Iterative camera and computer designs were tested in the laboratory using a high-pressure hydraulic pressure chamber. Cameras were assessed for functionality before, during, and after testing to determine survival and performance, while potted Raspberry Pi computers were powered on and communicating via SSH and/or RealVNC® Remote Desktop throughout pressure cycling.
Following successful laboratory testing, two field deployments of DEEPi cameras were conducted in deep water approximately 7km due East of Castle Harbor, Bermuda. Two DEEPi cameras and control computers were attached to a free-falling BRUV lander system equipped with lights and a depth/temperature logger. In this original configuration, the Raspberry Pi Zero W computers were not epoxy potted; ribbon-cable pass-throughs were 3D printed into a custom, thick bulkhead attached to a standard 1 atm titanium housing (Fig. 1B). During the first deployment to 715 m depth (ambient temperature 10.8 C) both cameras recorded video for approximately 2 h at depth. The second deployment to 1096 m depth (ambient temperature 5.3 C) recorded successfully for approximately 6 h at depth. The BRUVs recorded HD video of several deep-sea fish species including dogfish sharks, a cutthroat eel, and sixgill sharks (Fig. 4, Supplementary Material).
Next steps
Karla Haiat Sasson, who was a guest student at Woods Hole Oceanographic Institute summer of 2019, and who is a participant of the DEEPi project at the department of Ocean Engineering at the University of Rhode Island, worked on a project to adapt the DEEPi cameras, which were shown to work successfully, into a biologging system for a WHOI project directed by Tag Lab director Amy Kukulya, that seeks more information on the biology of gray seals in Cape Cod.
As she mentioned in this paper, the system is designed to have:
- Two camera views that allow up to 360 views of a tagged animal
- Recording of sensor data and video on bootup
- An on and off magnetic switch
- 6.7 Ah battery that allows for system recording to last up to 11 hours
- IR light sensor modules that allow for recording in the dark with minimal effect on natural behavior
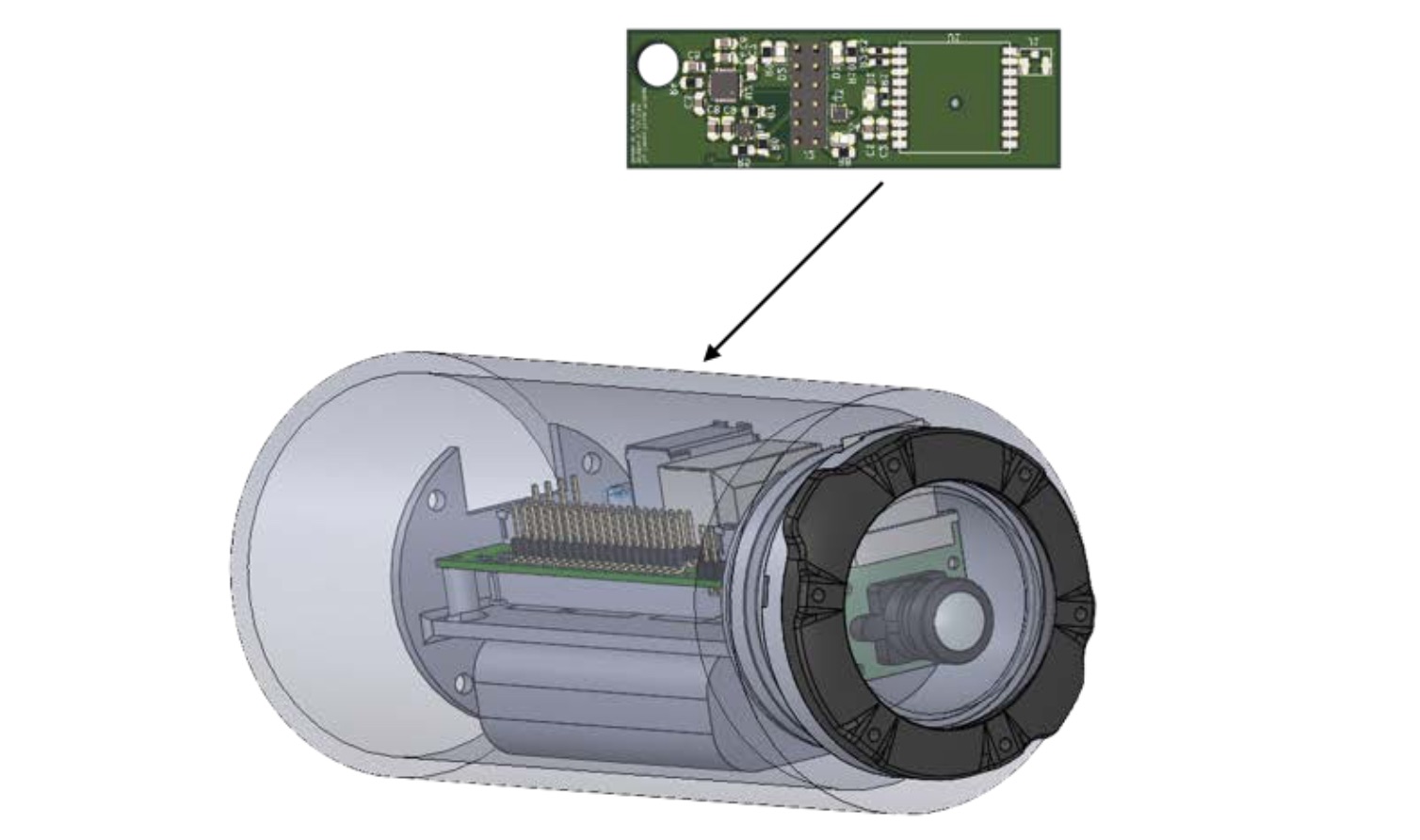
Can you find a StereoPi board on this model? ☺
Hardware plans:
- StereoPi - Stereoscopic camera board based on the Raspberry Pi Compute Module which allows attachment of two camera modules to the compute module.
- Sensor PCB- Small 0.75x 2’’ board that integrates GPS, accelerometer/gyroscope, light sensor and a pressure transducer (pressure and temperature data) IR light sensor modules with light sensors that turn IR lights on below set threshold
- Two Raspberry Pi camera modules with no IR filter for night vision
So let’s wait for the summer time to get more news on this project!
DEEPi shots

Image stills from HD video recorded at 700–1100 m deep in Bermuda. Left: Dogfish shark (Mustelus canis insularis), Middle: cutthroat eel (Synapho- branchidae family); Right: Sixgill shark (Hexanchus griseus).
Conclusion
We’d like to thank Dr. Brennan Phillips and Karla Haiat Sasson for help with this article! Actually this research was done by a group of scientists, and we’d like to thank all participants:
1. Karla Haiat Sasson, Amy Kukulya, Erin Fischell, Annie Kroo, Caileigh Fitzgerald, Andrew Palleiko, Chris Rauch and Cecelia Kane of WHOI (Woods hole Oceanographic Institution) for help with the project and Brennan Phillips of URI for his camera housing designs
Related paperwork: Multi-Sensor Bio-Logging Camera Tag
2. Brennan T. Phillips (a,b) , Stephen Licht (a), Karla S. Haiat (a), Jake Bonney (a), Josh Allder (a), Nicholas Chaloux (a), Russell Shomberg (a), Tim J. Noyes (c, d)
(a) University of Rhode Island, Department of Ocean Engineering, 215 South Ferry Road, Narragansett, RI, USA
(b) University of Rhode Island, Graduate School of Oceanography, Narragansett, RI, USA
(c) Bermuda Institute of Ocean Sciences, St. George’s, Bermuda
(d) University of Salford, School of Environmental and Life Sciences, Salford, UK
Related paperwork: Phillips et al., Deep-Sea Research I 2019
To contact authors, please use email:
Karla Haiat Sasson: karlahaiat[at]gmail.com
Amy Kukulya: akukulya[at]whoi.edu
Dr. Brennan Phillips: brennanphillips[at]uri.edu
Tag Lab project site: https://www2.whoi.edu/site/taglab/